39. Optimal Unemployment Insurance#
39.1. Overview#
This lecture describes a model of optimal unemployment insurance created by Shavell and Weiss (1979) [SW79].
We use recursive techniques of Hopenhayn and Nicolini (1997) [HN97] to compute optimal insurance plans for Shavell and Weiss’s model.
Hopenhayn and Nicolini’s model is a generalization of Shavell and Weiss’s along dimensions that we’ll soon describe.
39.2. Shavell and Weiss’s Model#
An unemployed worker orders stochastic processes of consumption and search effort \(\{c_t , a_t\}_{t=0}^\infty\) according to
where \(\beta \in (0,1)\) and \(u(c)\) is strictly increasing, twice differentiable, and strictly concave.
We assume that \(u(0)\) is well defined.
We require that \(c_t \geq 0\) and \( a_t \geq 0\).
All jobs are alike and pay wage \(w >0\) units of the consumption good each period forever.
An unemployed worker searches with effort \(a\) and with probability \(p(a)\) receives a permanent job at the beginning of the next period.
Furthermore, \(a=0\) when the worker is employed.
The probability of finding a job is \(p(a)\) where \(p\) is an increasing, strictly concave, and twice differentiable function of \(a\) that satisfies \(p(a) \in [0,1]\) for \(a \geq 0\), \(p(0)=0\).
The consumption good is nonstorable.
An unemployed worker has no savings and cannot borrow or lend.
An insurance agency or planner is the unemployed worker’s only source of consumption smoothing over time and across states.
Once a worker has found a job, he is beyond the planner’s grasp.
This is Shavell and Weiss’s assumption, but not Hopenhayn and Nicolini’s.
Hopenhayn and Nicolini allow the unemployment insurance agency to impose history-dependent taxes on previously unemployed workers.
Since there is no incentive problem after the worker has found a job, it is optimal for the agency to provide an employed worker with a constant level of consumption.
Hence, Hopenhayn and Nicolini’s insurance agency imposes a permanent per-period history-dependent tax on a previously unemployed but presently employed worker.
39.2.1. Autarky#
As a benchmark, we first study the fate of an unemployed worker who has no access to unemployment insurance.
Because employment is an absorbing state for the worker, we work backward from that state.
Let \(V^e\) be the expected sum of discounted one-period utilities of an employed worker.
Once the worker is employed, \(a=0\), making his period utility be \(u(c)-a = u(w)\) forever.
Therefore,
Now let \(V^u\) be the expected discounted present value of utility for an unemployed worker who chooses consumption, effort pair \((c,a)\) optimally.
It satisfies the Bellman equation
The first-order condition for a maximum is
with equality if \(a>0\).
Since there is no state variable in this infinite horizon problem, there is a time-invariant optimal search intensity \(a\) and an associated value of being unemployed \(V^u\).
Let \(V_{\rm aut} = V^u\) solve Bellman equation (39.3).
Equations (39.3) and (39.4) form the basis for an iterative algorithm for computing \(V^u = V_{\rm aut}\).
39.2.2. Full Information#
Another benchmark model helps set the stage for the model with private information that we ultimately want to study.
In this model, the unemployment agency has full information about the unemployed work.
We study optimal provision of insurance with full information.
An insurance agency can set both the consumption and search effort of an unemployed person.
The agency wants to design an unemployment insurance contract to give the unemployed worker expected discounted utility \(V > V_{\rm aut}\).
The planner wants to deliver value \(V\) efficiently, meaning in a way that minimizes expected discounted cost, using \(\beta\) as the discount factor.
We formulate the optimal insurance problem recursively.
Let \(C(V)\) be the expected discounted cost of giving the worker expected discounted utility \(V\).
The cost function is strictly convex because a higher \(V\) implies a lower marginal utility of the worker; that is, additional expected utils can be awarded to the worker only at an increasing marginal cost in terms of the consumption good.
Given \(V\), the planner assigns first-period pair \((c,a)\) and promised continuation value \(V^u\), should the worker be unlucky and not find a job.
\((c, a, V^u)\) are chosen to be functions of \(V\) and to satisfy the Bellman equation
where minimization is subject to the promise-keeping constraint
Here \(V^e\) is given by equation (39.2), which reflects the assumption that once the worker is employed, he is beyond the reach of the unemployment insurance agency.
The right side of Bellman equation (39.5) is attained by policy functions \(c=c(V), a=a(V)\), and \(V^u=V^u(V)\).
The promise-keeping constraint, equation (39.6), asserts that the 3-tuple \((c, a, V^u)\) attains at least \(V\).
Let \(\theta\) be a Lagrange multiplier on constraint (39.6).
At an interior solution, the first-order conditions with respect to \(c, a\), and \(V^u\), respectively, are
The envelope condition \(C'(V) = \theta\) and the third equation of (39.7) imply that \(C'(V^u) =C'(V)\).
Strict convexity of \(C\) then implies that \(V^u =V\)
Applied repeatedly over time, \(V^u=V\) makes the continuation value remain constant during the entire spell of unemployment.
The first equation of (39.7) determines \(c\), and the second equation of (39.7) determines \(a\), both as functions of promised value \(V\).
That \(V^u = V\) then implies that \(c\) and \(a\) are held constant during the unemployment spell.
Thus, the unemployed worker’s consumption \(c\) and search effort \(a\) are both fully smoothed during the unemployment spell.
But the worker’s consumption is not smoothed across states of employment and unemployment unless \(V=V^e\).
39.2.3. Incentive Problem#
The preceding efficient insurance scheme requires that the insurance agency control both \(c\) and \(a\).
It will not do for the insurance agency simply to announce \(c\) and then allow the worker to choose \(a\).
Here is why.
The agency delivers a value \(V^u\) higher than the autarky value \(V_{\rm aut}\) by doing two things.
It increases the unemployed worker’s consumption \(c\) and decreases his search effort \(a\).
But the prescribed search effort is higher than what the worker would choose if he were to be guaranteed consumption level \(c\) while he remains unemployed.
This follows from the first two equations of (39.7) and the fact that the insurance scheme is costly, \(C(V^u)>0\), which imply \([ \beta p'(a) ]^{-1} > (V^e - V^u)\).
But look at the worker’s first-order condition (39.4) under autarky.
It implies that if search effort \(a>0\), then \([\beta p'(a)]^{-1} = [V^e - V^u]\), which is inconsistent with the preceding inequality \([ \beta p'(a) ]^{-1} > (V^e - V^u)\) that prevails when \(a >0\) under the social insurance arrangement.
If he were free to choose \(a\), the worker would therefore want to fulfill (39.4), either at equality so long as \(a >0\), or by setting \(a=0\) otherwise.
Starting from the \(a\) associated with the social insurance scheme, he would establish the desired equality in (39.4) by lowering \(a\), thereby decreasing the term \([ \beta p'(a) ]^{-1}\) (which also lowers \((V^e - V^u)\) when the value of being unemployed \(V^u\) increases).
If an equality can be established before \(a\) reaches zero, this would be the worker’s preferred search effort; otherwise the worker would find it optimal to accept the insurance payment, set \(a=0\), and never work again.
Thus, since the worker does not take the cost of the insurance scheme into account, he would choose a search effort below the socially optimal one.
The efficient contract relies on the agency’s ability to control both the unemployed worker’s consumption and his search effort.
39.3. Private Information#
Following Shavell and Weiss (1979) [SW79] and Hopenhayn and Nicolini (1997) [HN97], now assume that the unemployment insurance agency cannot observe or enforce \(a\), though it can observe and control \(c\).
The worker is free to choose \(a\), which puts expression (39.4), the worker’s first-order condition under autarky, back in the picture.
We are assuming that the worker’s best response to the unemployment insurance arrangement is completely characterized by the first-order condition (39.4), an instance of the so-called first-order approach to incentive problems.
Given a contract, the individual will choose search effort according to first-order condition (39.4).
This fact leads the insurance agency to design the unemployment insurance contract to respect this restriction.
Thus, the recursive contract design problem is now to minimize the right side of equation (39.5) subject to expression (39.6) and the incentive constraint (39.4).
Since the restrictions (39.4) and (39.6) are not linear and generally do not define a convex set, it becomes difficult to provide conditions under which the solution to the dynamic programming problem results in a convex function \(C(V)\).
Sometimes this complication can be handled by convexifying the constraint set through the introduction of lotteries.
A common finding is that optimal plans do not involve lotteries, because convexity of the constraint set is a sufficient but not necessary condition for convexity of the cost function.
Following Hopenhayn and Nicolini (1997) [HN97], we therefore proceed under the assumption that \(C(V)\) is strictly convex in order to characterize the optimal solution.
Let \(\eta\) be the multiplier on constraint (39.4), while \(\theta\) continues to denote the multiplier on constraint (39.6).
But now we replace the weak inequality in (39.6) by an equality.
The unemployment insurance agency cannot award a higher utility than \(V\) because that might violate an incentive-compatibility constraint for exerting the proper search effort in earlier periods.
At an interior solution, first-order conditions with respect to \(c, a\), and \(V^u\), respectively, are
where the second equality in the second equation in (39.8) follows from strict equality of the incentive constraint (39.4) when \(a>0\).
As long as the insurance scheme is associated with costs, so that \(C(V^u)>0\), first-order condition in the second equation of (39.8) implies that the multiplier \(\eta\) is strictly positive.
The first-order condition in the second equation of the third equality in (39.8) and the envelope condition \(C'(V) = \theta\) together allow us to conclude that \(C'(V^u) < C'(V)\).
Convexity of \(C\) then implies that \(V^u < V\).
After we have also used the first equation of (39.8), it follows that in order to provide the proper incentives, the consumption of the unemployed worker must decrease as the duration of the unemployment spell lengthens.
It also follows from (39.4) at equality that search effort \(a\) rises as \(V^u\) falls, i.e., it rises with the duration of unemployment.
The duration dependence of benefits is designed to provide incentives to search.
To see this, from the third equation of (39.8), notice how the conclusion that consumption falls with the duration of unemployment depends on the assumption that more search effort raises the prospect of finding a job, i.e., that \(p'(a) > 0\).
If \(p'(a) =0\), then the third equation of (39.8) and the strict convexity of \(C\) imply that \(V^u =V\).
Thus, when \(p'(a) =0\), there is no reason for the planner to make consumption fall with the duration of unemployment.
39.3.1. Computational Details#
It is useful to note that there are natural lower and upper bounds to the set of continuation values \(V^u\).
The lower bound is the expected lifetime utility in autarky, \(V_{\rm aut}\).
To compute the upper bound, represent condition (39.4) as
with equality if \( a > 0\).
If there is zero search effort, then \(V^u \geq V^e -[\beta p'(0)]^{-1}\).
Therefore, to rule out zero search effort we require
(Remember that \(p''(a) < 0\).)
This step gives our upper bound for \(V^u\).
To formulate the Bellman equation numerically, we suggest using the constraints to eliminate \(c\) and \(a\) as choice variables, thereby reducing the Bellman equation to a minimization over the one choice variable \(V^u\).
First express the promise-keeping constraint (39.6) at equality as
so that consumption is
Similarly, solving the inequality (39.4) for \(a\) leads to
When we specialize (39.10) to the functional form for \(p(a)\) used by Hopenhayn and Nicolini, we obtain
Formulas (39.9) and (39.11) express \((c,a)\) as functions of \(V\) and the continuation value \(V^u\).
Using these functions allows us to write the Bellman equation in \(C(V)\) as
where \(c\) and \(a\) are given by equations (39.9) and (39.11).
39.3.2. Python Computations#
We’ll approximate the planner’s optimal cost function with cubic splines.
To do this, we’ll load some useful modules
import numpy as np
import scipy as sp
import matplotlib.pyplot as plt
We first create a class to set up a particular parametrization.
class params_instance:
def __init__(self,
r,
β = 0.999,
σ = 0.500,
w = 100,
n_grid = 50):
self.β,self.σ,self.w,self.r = β,σ,w,r
self.n_grid = n_grid
uw = self.w**(1-self.σ)/(1-self.σ) #Utility from consuming all wage
self.Ve = uw/(1-β)
39.3.3. Parameter Values#
For the other parameters we have just loaded in the above Python code, we’ll set brate the net interest rate \(r\) to match the hazard rate – the probability of finding a job in one period – in US data.
In particular, we seek an \(r\) so that in autarky p(a(r)) = 0.1, where a is the optimal search effort.
First, we create some helper functions.
# The probability of finding a job given search effort, a and interest rate r.
def p(a,r):
return 1-np.exp(-r*a)
def invp_prime(x,r):
return -np.log(x/r)/r
def p_prime(a,r):
return r*np.exp(-r*a)
# The utiliy function
def u(self,c):
return (c**(1-self.σ))/(1-self.σ)
def u_inv(self,x):
return ((1-self.σ)*x)**(1/(1-self.σ))
Recall that under autarky the value for an unemployed worker satisfies the Bellman equation
At the optimal choice of \(a\), we have the first order condition for this problem as:
with equality when a >0.
Given an interest rate \(\bar{r}\), we can solve the autarky problem as follows:
Guess \(V^u \in \mathbb{R}^{+}\)
Given \(V^u\), use the FOC (39.14) to calculate the implied optimal search effort \(a\)
Evaluate the difference between the LHS and RHS of the Bellman equation (39.13)
Update guess for \(V^u\) accordingly, then return to 2) and repeat until the Bellman equation is satisfied.
For a given \(r\) and guess \(V^u\),
the function Vu_error calculates the error in the Bellman equation under the optimal search intensity.
We’ll soon use this as an input to computing \(V^u\).
# The error in the Bellman equation that requires equality at
# the optimal choices.
def Vu_error(self,Vu,r):
β= self.β
Ve = self.Ve
a = invp_prime(1/(β*(Ve-Vu)),r)
error = u(self,0) -a + β*(p(a,r)*Ve + (1-p(a,r))*Vu) - Vu
return error
Since the calibration exercise is to match the hazard rate under autarky to the data, we must find an interest rate \(r\) to match p(a,r) = 0.1.
The function below r_error calculates, for a given guess of \(r\) the difference between the model implied equilibrium hazard rate and 0.1.
This will be used to solve for the a calibrated \(r^*\).
# The error of our p(a^*) relative to our calibration target
def r_error(self,r):
β = self.β
Ve = self.Ve
Vu_star = sp.optimize.fsolve(Vu_error_Λ,15000,args = (r))
a_star = invp_prime(1/(β*(Ve-Vu_star)),r) # Assuming a>0
return p(a_star,r) - 0.1
Now, let us create an instance of the model with our parametrization
params = params_instance(r = 1e-2)
# Create some lambda functions useful for fsolve function
Vu_error_Λ = lambda Vu,r: Vu_error(params,Vu,r)
r_error_Λ = lambda r: r_error(params,r)
We want to compute an \(r\) that is consistent with the hazard rate 0.1 in autarky.
To do so, we will use a bisection strategy.
r_calibrated = sp.optimize.brentq(r_error_Λ,1e-10,1-1e-10)
print(f"Interest rate to match 0.1 hazard rate: r = {r_calibrated}")
Vu_aut = sp.optimize.fsolve(Vu_error_Λ,15000,args = (r_calibrated))[0]
a_aut = invp_prime(1/(params.β*(params.Ve-Vu_aut)),r_calibrated)
print(f"Check p at r: {p(a_aut,r_calibrated)}")
Interest rate to match 0.1 hazard rate: r = 0.0003431409393866592
Check p at r: 0.10000000000001996
/usr/share/miniconda3/envs/quantecon/lib/python3.11/site-packages/scipy/optimize/_minpack_py.py:177: RuntimeWarning: The iteration is not making good progress, as measured by the
improvement from the last five Jacobian evaluations.
warnings.warn(msg, RuntimeWarning)
Now that we have calibrated our interest rate \(r\), we can continue with solving the model with private information.
39.3.4. Computation under Private Information#
Our approach to solving the full model is a variant on Judd (1998) [Jud98], who uses a polynomial to approximate the value function and a numerical optimizer to perform the optimization at each iteration.
In contrast, we will use cubic splines to interpolate across a pre-set grid of points to approximate the value function. For further details of the Judd (1998) [Jud98] method, see [LS18], Section 5.7.
Our strategy involves finding a function \(C(V)\) – the expected cost of giving the worker value \(V\) – that satisfies the Bellman equation:
To solve this model, notice that in equations (39.9) and (39.11), we have analytical solutions of \(c\) and \(a\) in terms of (at most) promised value \(V\) and \(V^u\) (and other parameters).
We can substitute these equations for \(c\) and \(a\) and obtain the functional equation (39.12) that we want to solve.
def calc_c(self,Vu,V,a):
'''
Calculates the optimal consumption choice coming from the constraint of the insurer's problem
(which is also a Bellman equation)
'''
β,Ve,r = self.β,self.Ve,self.r
c = u_inv(self,V + a - β*(p(a,r)*Ve + (1-p(a,r))*Vu))
return c
def calc_a(self,Vu):
'''
Calculates the optimal effort choice coming from the worker's effort optimality condition.
'''
r,β,Ve = self.r,self.β,self.Ve
a_temp = np.log(r*β*(Ve - Vu))/r
a = max(0,a_temp)
return a
With these analytical solutions for optimal \(c\) and \(a\) in hand, we can reduce the minimization to (39.12) in the single variable \(V^u\).
With this in hand, we have our algorithm.
39.3.5. Algorithm#
Fix a set of grid points \(grid_V\) for \(V\) and \(Vu_{grid}\) for \(V^u\)
Guess a function \(C_0(V)\) that is evaluated at a grid \(grid_V\).
For each point in \(grid_V\) find the \(V^u\) that minimizes the expression on right side of (39.12). We find the minimum by evaluating the right side of (39.12) at each point in \(Vu_{grid}\) and then finding the minimum using cubic splines.
Evaluating the minimum across all points in \(grid_V\) gives you another function \(C_1(V)\).
If \(C_0(V)\) and \(C_1(V)\) are sufficiently different, then repeat steps 3-4 again. Otherwise, we are done.
Thus, the iterations are \(C_{j+1}(V) = \min_{c,a, V^u} \{c - \beta [1 - p(a) ] C_j(V)\} \).
The function iterate_C below executes step 3 in the above algorithm.
# Operator iterate_C that calculates the next iteration of the cost function.
def iterate_C(self,C_old,Vu_grid):
'''
We solve the model by minimising the value function across a grid of possible promised values.
'''
β,r,n_grid = self.β,self.r,self.n_grid
C_new = np.zeros(n_grid)
cons_star = np.zeros(n_grid)
a_star = np.zeros(n_grid)
V_star = np.zeros(n_grid)
C_new2 = np.zeros(n_grid)
V_star2 = np.zeros(n_grid)
for V_i in range(n_grid):
C_Vi_temp = np.zeros(n_grid)
cons_Vi_temp = np.zeros(n_grid)
a_Vi_temp = np.zeros(n_grid)
for Vu_i in range(n_grid):
a_i = calc_a(self,Vu_grid[Vu_i])
c_i = calc_c(self,Vu_grid[Vu_i],Vu_grid[V_i],a_i)
C_Vi_temp[Vu_i] = c_i + β*(1-p(a_i,r))*C_old[Vu_i]
cons_Vi_temp[Vu_i] = c_i
a_Vi_temp[Vu_i] = a_i
# Interpolate across the grid to get better approximation of the minimum
C_Vi_temp_interp = sp.interpolate.interp1d(Vu_grid,C_Vi_temp, kind = 'cubic')
cons_Vi_temp_interp = sp.interpolate.interp1d(Vu_grid,cons_Vi_temp, kind = 'cubic')
a_Vi_temp_interp = sp.interpolate.interp1d(Vu_grid,a_Vi_temp, kind = 'cubic')
res = sp.optimize.minimize_scalar(C_Vi_temp_interp,method='bounded',bounds = (Vu_min,Vu_max))
V_star[V_i] = res.x
C_new[V_i] = res.fun
# Save the associated consumpton and search policy functions as well
cons_star[V_i] = cons_Vi_temp_interp(V_star[V_i])
a_star[V_i] = a_Vi_temp_interp(V_star[V_i])
return C_new,V_star,cons_star,a_star
The below code executes steps 4 and 5 in the Algorithm until convergence to a function \(C^*(V)\).
def solve_incomplete_info_model(self,Vu_grid,Vu_aut,tol = 1e-6,max_iter = 10000):
iter = 0
error = 1
C_init = np.ones(self.n_grid)*0
C_old = np.copy(C_init)
while iter<max_iter and error >tol:
C_new,V_new,cons_star,a_star = iterate_C(self,C_old,Vu_grid)
error = np.max(np.abs(C_new - C_old))
#Only print the iterations every 50 steps
if iter % 50 ==0:
print(f"Iteration: {iter}, error:{error}")
C_old = np.copy(C_new)
iter+=1
return C_new,V_new,cons_star,a_star
39.4. Outcomes#
Using the above functions, we create another instance of the parameters with the correctly calibrated interest rate, \(r\).
##? Create another instance with the correct r now
params = params_instance(r = r_calibrated)
#Set up grid
Vu_min = Vu_aut
Vu_max = params.Ve - 1/(params.β*p_prime(0,params.r))
Vu_grid = np.linspace(Vu_min,Vu_max,params.n_grid)
#Solve model
C_star,V_star,cons_star,a_star = solve_incomplete_info_model(params,Vu_grid,Vu_aut,tol = 1e-6,max_iter = 10000) #,cons_star,a_star
# Since we have the policy functions in grid form, we will interpolate them to be able to
# evaluate any promised value
cons_star_interp = sp.interpolate.interp1d(Vu_grid,cons_star)
a_star_interp = sp.interpolate.interp1d(Vu_grid,a_star)
V_star_interp = sp.interpolate.interp1d(Vu_grid,V_star)
Iteration: 0, error:72.95964854907824
Iteration: 50, error:12.222761762480786
Iteration: 100, error:0.12875960366727668
Iteration: 150, error:0.0009402349710398994
Iteration: 200, error:6.115462838351959e-06
39.4.1. Replacement Ratios and Continuation Values#
We want to graph the replacement ratio (\(c/w\)) and search effort \(a\) as functions of the duration of unemployment.
We’ll do this for three levels of \(V_0\), the lowest being the autarky value \(V_{\rm aut}\).
We accomplish this by using the optimal policy functions V_star, cons_star and a_star computed above as well the following iterative procedure:
# Replacement ratio and effort as a function of unemployment duration
T_max = 52
Vu_t = np.empty((T_max,3))
cons_t = np.empty((T_max-1,3))
a_t = np.empty((T_max-1,3))
# Calculate the replacement ratios depending on different initial
# promised values
Vu_0_hold = np.array([Vu_aut,16942,17000])
for i,Vu_0, in enumerate(Vu_0_hold):
Vu_t[0,i] = Vu_0
for t in range(1,T_max):
cons_t[t-1,i] = cons_star_interp(Vu_t[t-1,i])
a_t[t-1,i] = a_star_interp(Vu_t[t-1,i])
Vu_t[t,i] = V_star_interp(Vu_t[t-1,i])
fontSize = 10
plt.rc('font', size=fontSize) # controls default text sizes
plt.rc('axes', titlesize=fontSize) # fontsize of the axes title
plt.rc('axes', labelsize=fontSize) # fontsize of the x and y labels
plt.rc('xtick', labelsize=fontSize) # fontsize of the tick labels
plt.rc('ytick', labelsize=fontSize) # fontsize of the tick labels
plt.rc('legend', fontsize=fontSize) # legend fontsize
f1 = plt.figure(figsize = (8,8))
plt.subplot(2,1,1)
plt.plot(range(T_max-1),cons_t[:,0]/params.w,label = '$V^u_0$ = 16759 (aut)',color = 'red')
plt.plot(range(T_max-1),cons_t[:,1]/params.w,label = '$V^u_0$ = 16942',color = 'blue')
plt.plot(range(T_max-1),cons_t[:,2]/params.w,label = '$V^u_0$ = 17000',color = 'green')
plt.ylabel("Replacement ratio (c/w)")
plt.legend()
plt.title("Optimal replacement ratio")
plt.subplot(2,1,2)
plt.plot(range(T_max-1),a_t[:,0],color = 'red')
plt.plot(range(T_max-1),a_t[:,1],color = 'blue')
plt.plot(range(T_max-1),a_t[:,2],color = 'green')
plt.ylim(0,320)
plt.ylabel("Optimal search effort (a)")
plt.xlabel("Duration of unemployment")
plt.title("Optimal search effort")
plt.show()
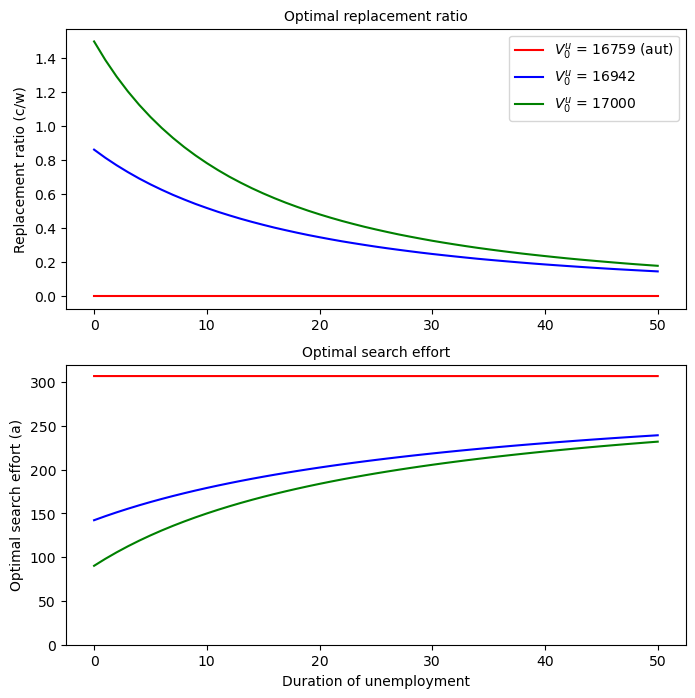
For an initial promised value \(V^u = V_{\rm aut}\), the planner chooses the autarky level of \(0\) for the replacement ratio and instructs the worker to search at the autarky search intensity, regardless of the duration of unemployment
But for \(V^u > V_{\rm aut}\), the planner makes the replacement ratio decline and search effort increase with the duration of unemployment.
39.4.2. Interpretations#
The downward slope of the replacement ratio when \(V^u > V_{\rm aut}\) is a consequence of the the planner’s limited information about the worker’s search effort.
By providing the worker with a duration-dependent schedule of replacement ratios, the planner induces the worker in effect to reveal his/her search effort to the planner.
We saw earlier that with full information, the planner would smooth consumption over an unemployment spell by keeping the replacement ratio constant.
With private information, the planner can’t observe the worker’s search effort and therefore makes the replacement ratio fall.
Evidently, search effort rise as the duration of unemployment increases, especially early in an unemployment spell.
There is a carrot-and-stick aspect to the replacement rate and search effort schedules:
the carrot occurs in the forms of high compensation and low search effort early in an unemployment spell.
the stick occurs in the low compensation and high effort later in the spell.
We shall encounter a related carrot-and-stick feature in our other lectures about dynamic programming squared.
The planner offers declining benefits and induces increased search effort as the duration of an unemployment spell rises in order to provide an unemployed worker with proper incentives, not to punish an unlucky worker who has been unemployed for a long time.
The planner believes that a worker who has been unemployed a long time is unlucky, not that he has done anything wrong (i.e., has not lived up to the contract).
Indeed, the contract is designed to induce the unemployed workers to search in the way the planner expects.
The falling consumption and rising search effort of the unlucky ones with long unemployment spells are simply costs that have to be paid in order to provide proper incentives.